







;)
;)





 이미지 확대보기
이미지 확대보기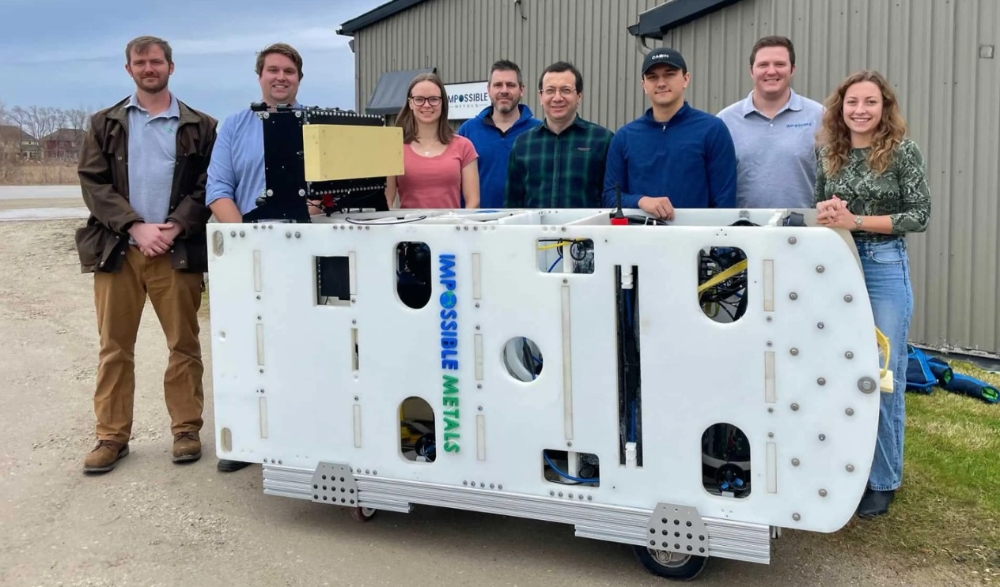
녹색 경제는 엄청난 양의 배터리 금속을 필요로 하지만 채굴하기가 쉽지 않다. 깊은 해저에 꽁꽁 묻혀있기 때문이다. 이 금속을 선점하느라 선진 각국들은 갖가지의 기술개발에 적극적이다. 최근 임파서블 메탈스는 광산용 로봇으로 금속을 채굴하는 새로운 방법을 개발했다.
구리, 망간, 코발트, 니켈 등의 광석은 수십억 달러에 달하는 값비싼 배터리 관련 금속들이다. 이 금속들은 심해의 해저에서만 존재한다. 감자보다 크지 않은 형태로 ‘다 금속 결절’의 거대한 들판에 앉아 있다.
과학자들은 이 금속 결절이 1cm 성장하는 데는 수백 만 년이 걸린다고 말한다. 높은 산소가 함유된 해수에서 금속을 침전시키거나 가장 느린 지질학적 과정에 의해 만들어 지는 것이다.
심해에서 금속을 채굴하는 것은 기술적으로 어렵고 논란의 여지도 많다. 해저는 거대한 생물 군계로 이뤄져 있고, 인류가 거의 손대지 않은 지구상의 몇 안 되는 생물 군계 중 하나여서 무작정 채굴하는 것은 생태계 파괴로 이어진다.
해저 채굴의 초기 방법은 해저의 넓은 지역을 준설하거나 진공청소기로 처리하는 방식을 택했다. 기존의 해저 채국 방식은 암석뿐만 아니라 다른 생태계까지 진공기로 빨아들이고, 금속 결절이 아닌 것들은 다시 뱉어냈다.
이 방식이 환경에 어떤 영향을 미칠까 하는 의문은 해버 채굴의 중요한 관점이다.
독일은 1989년에 DISCOL(Disturbance Recolonization Experiment) 테스트했다. 디스콜 실험은 심해 채굴이 심해 생태계에 미치는 영향에 대해 가장 자주 인용되는 실험이다. 실험된 장소는 태평양 페루 연안의 11㎢에 달했다. 이 일대를 쟁기로 모두 갈아엎는 실험을 통해 해저의 생명체가 어떻게 변화되는지 확인했다.
 이미지 확대보기
이미지 확대보기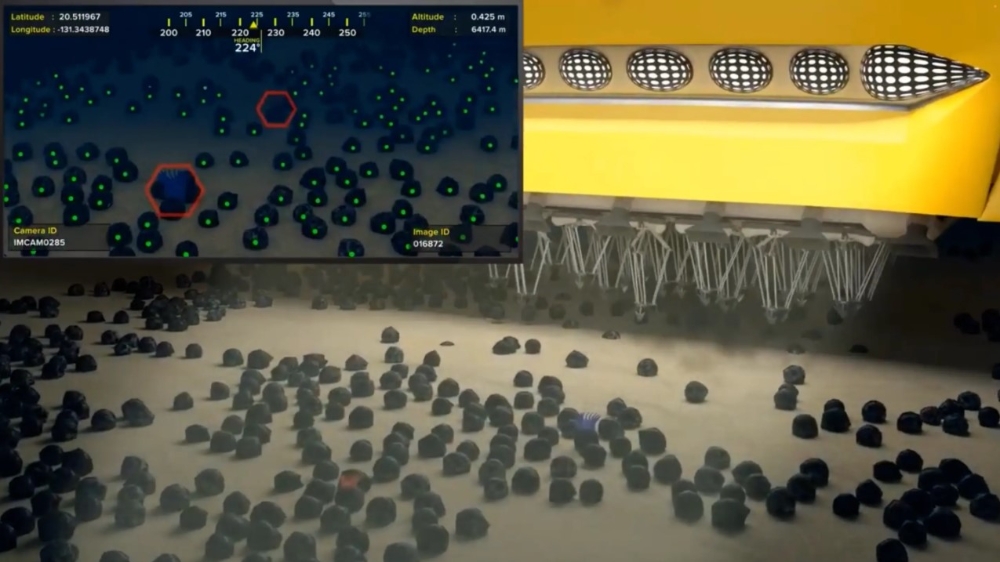
준설 없이 해저 지역을 채굴한다고 하더라도 금속 결절을 집으로 만드는 종(種)에게는 치명적인 해가 된다는 점도 밝혀졌다. 결국 초기에 공공연히 시행됐던 해저 광산을 발굴하는 산업은 이전의 어떤 산업보다도 환경 영향을 훨씬 더 많이 고려해야 한다는 결론을 얻은 것이다.
이 실험 이후로 UN의 국제해저당국(ISA)은 일부에게만 탐사 면허를 부여했다. 아직 상업적 채굴 허가는 전혀 없는 실정이다.
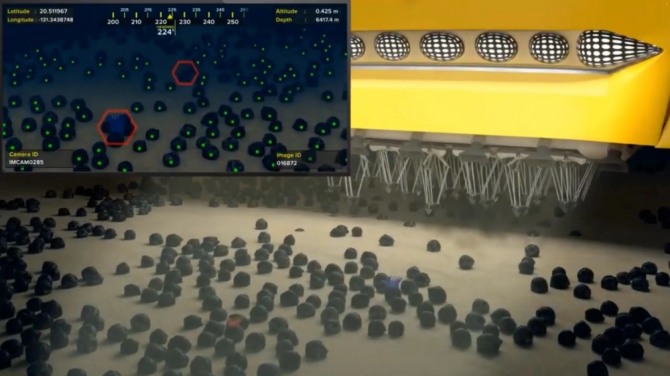
임파서블 메탈스는 해저의 생태계에 미치는 영향을 최소화하면서 ‘다금속 바다 스퍼드’를 수확하는 방법을 찾고 있다. 임파서블 메탈스는 해저 근처를 따라 떠다니는 로봇 피커어퍼(picker-upper)를 개발했다. 이 장치는 로봇에 장착된 카메라로 해저 생태계를 촬영하여 올바른 종류의 금속 결절만을 찾아내고, AI를 사용하여 눈에 보이는 금속 결절을 찾아내는 방식이다. 나머지 생태계는 있는 그대로 내버려 둘 수 있다는 장점을 가졌다. 이 방법은 작은 로봇의 발톱이 금속 표면에 조심스럽게 멍에를 씌우는 방법이기 때문에 다른 생태계에 영향을 주지 않는다.
이 로봇은 5㎞ 미만의 수심에서 작동하도록 설계되었다. 작동 방식은 매우 간단하다. 수면 위의 선박에서 로봇을 수면 아래로 내려 해저에 이를 때까지 가라앉히고, 금속 결절을 확보하게 되면 로봇의 부력 엔진을 사용하여 표면으로 돌아와 떨어뜨리는 구조를 갖는다.
이 로봇은 해저를 파헤치고 육상으로 펌핑하는 준설 스타일의 작업과는 전혀 다르다. 임파서블 메탈스가 개발한 로봇은 매번 다른 지점을 방문하여 위아래로 튀어 나올 수도 있다. 동작은 느리지만 불가능한 수율을 높이기 위해 점점 더 많은 로봇을 배치할 수도 있다.
임파서블 메탈스는 이제 약 25m 깊이에서 냉장고 크기의 ‘유레카 1’이라는 자율 수중 차량 프로토 타입의 실험을 마쳤다. 이 회사는 2026년까지 로봇을 개발하여 대규모로 배치한다는 계획이다. 실제 채굴 작업은 ISA 승인에 따라 달라질 것으로 예상된다.
과학자들은 해저 채굴은 어떤 방식이든지 불가피하게 심해 생태계를 교란시키고 일부 해양 생물을 죽일 수 있다고 지적한다. 그러나 임파서블 메탈스의 로봇보다 더 신중하고 책임감 있는 방식은 아직 없다고 주장한다. 해버 깊숙이 박혀 있는 배터리 금속을 표면으로 가져올 수 있는 방법은 상상하기 힘들 정도로 어려운 일이다. 임파서블 메탈스 연구원이 강조하는 말이다.
김종대 글로벌철강문화원 원장






















