







;)
;)
;)





CVPR 하이라이트 논문 선정…고속 주행·저조도 환경서 정밀 인식
로봇·자율주행·AI 영상분석·AR·VR 분야 활용 기대
로봇·자율주행·AI 영상분석·AR·VR 분야 활용 기대
 이미지 확대보기
이미지 확대보기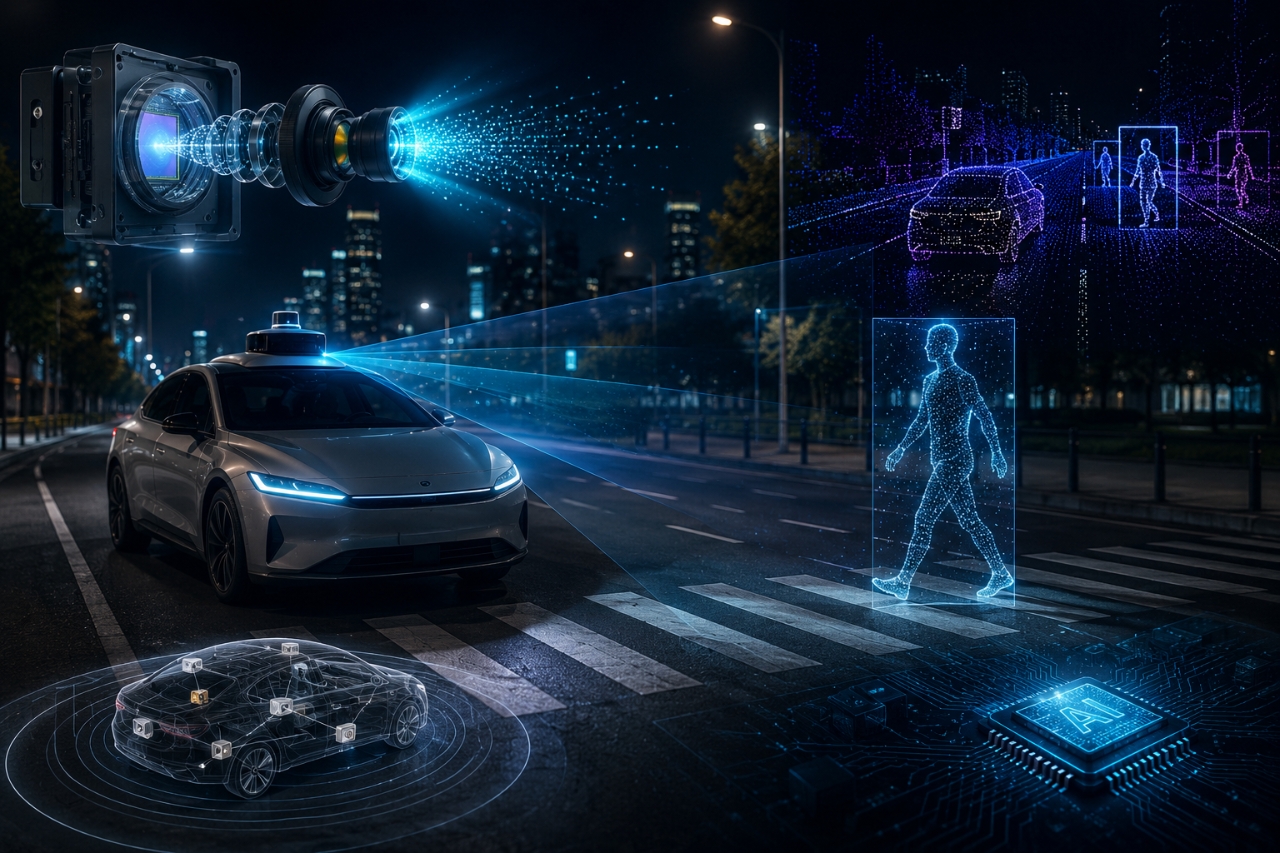
AI 기술 경쟁이 치열해질수록 자동차와 로봇이 세상을 얼마나 정확하게 볼 수 있는지가 새로운 경쟁력으로 떠오르고 있다. UNIST 연구진이 어두운 환경과 빠른 움직임에서도 물체를 정밀하게 인식할 수 있는 차세대 카메라 기술을 개발했다.
UNIST는 인공지능대학원 주경돈 교수 연구팀이 차세대 영상센서인 이벤트 카메라(Event Camera)를 보다 쉽고 정확하게 보정할 수 있는 컴퓨터비전 기술을 개발했다고 1일 밝혔다.
이번 연구는 오는 3일부터 미국 덴버에서 열리는 세계 최고 권위의 컴퓨터비전 학회인 CVPR(Computer Vision and Pattern Recognition Conference) 2026에서 하이라이트 논문으로 선정됐다. 하이라이트 논문은 연구의 완성도와 중요성을 종합 평가해 선정되며 전체 제출 논문 가운데 약 3.5%만 포함된다.
AI가 세상을 보는 방식이 바뀐다
이벤트 카메라는 일반 카메라와 작동 방식부터 다르다.
일반 카메라가 일정한 시간 간격으로 화면 전체를 촬영하는 방식이라면 이벤트 카메라는 밝기가 변하는 부분만 기록한다. 빠르게 움직이는 물체를 추적하거나 어두운 환경에서도 필요한 정보를 효율적으로 확보할 수 있어 차세대 자율주행차와 로봇, 증강현실(AR), 가상현실(VR) 분야의 핵심 센서로 주목받고 있다.
최근 글로벌 자동차업계와 빅테크 기업들은 자율주행차와 휴머노이드 로봇 개발 과정에서 센서 성능 향상에 막대한 투자를 이어가고 있다. 아무리 뛰어난 AI를 탑재하더라도 주변 환경을 정확하게 인식하지 못하면 오작동 가능성이 커지기 때문이다. 업계가 이벤트 카메라와 같은 차세대 비전센서에 주목하는 배경도 여기에 있다.
특히 기존 카메라보다 데이터 처리량과 전력 소모를 줄일 수 있다는 장점 때문에 자율주행과 로보틱스 분야에서 차세대 비전센서 후보로 관심이 높아지고 있다.
하지만 이벤트 카메라는 높은 성능에도 불구하고 정확한 보정이 쉽지 않았다. 카메라 렌즈는 촬영 과정에서 직선이 휘어 보이거나 물체 위치가 실제와 다르게 인식되는 왜곡이 발생한다.
이를 보정하기 위해 일반적으로 체스판 형태의 체커보드를 활용하지만 이벤트 카메라는 기준점이 되는 꼭짓점에서 밝기 변화 정보가 거의 발생하지 않아 기존 방식 적용에 한계가 있었다.
어두운 밤에도 놓치지 않는 눈
연구팀은 이벤트 데이터 자체에서 기준점을 찾아내는 새로운 방식을 개발했다.
먼저 체커보드의 선을 검출한 뒤 선이 만나는 영역 가운데 이벤트가 가장 적게 발생하는 지점을 기준점으로 인식하는 방식이다. 여기에 서로 다른 시점에 기록된 이벤트를 재정렬해 흐릿한 선을 선명하게 만드는 기술도 적용했다.
연구진은 이번 기술을 로봇과 자율주행 분야에서 널리 사용되는 위치 인식 표식인 에이프릴태그(AprilTag) 인식에도 적용했다. 실험 결과 이벤트 데이터만으로 표식의 형태와 번호를 판별할 수 있었으며 일부가 가려지거나 화면 밖으로 벗어난 상황에서도 안정적인 인식 성능을 확인했다.
기존 방식이 이벤트 데이터를 일반 영상 형태로 변환한 뒤 기준점을 찾았다면 이번 기술은 이벤트 신호 자체에서 기준점을 직접 검출한다는 점이 특징이다. 영상 복원 과정에서 발생할 수 있는 정보 손실을 줄이고 보다 정밀한 보정이 가능하다는 설명이다.
 이미지 확대보기
이미지 확대보기
기계의 눈 경쟁, 미래 산업을 좌우한다
AI 산업의 경쟁은 이제 언어를 이해하는 소프트웨어 경쟁을 넘어 현실 세계를 얼마나 정확하게 인식할 수 있는지의 경쟁으로 확장되고 있다.
자율주행차는 시속 수십㎞에서 수백㎞로 이동하는 환경에서 보행자와 차량, 신호체계를 실시간으로 인식해야 한다. 휴머노이드 로봇은 복잡한 실내외 환경에서 사람과 장애물, 물체를 구분해야 하며 AI CCTV는 수많은 영상 속에서 위험 상황을 찾아내야 한다. 결국 AI가 올바른 판단을 내리기 위해서는 먼저 정확한 시각 정보가 확보돼야 한다.
최근 글로벌 빅테크와 완성차 업계가 카메라와 센서 기술 경쟁에 집중하는 이유도 여기에 있다.
테슬라는 카메라 중심의 완전자율주행(FSD) 기술을 고도화하고 있으며 엔비디아는 자율주행차와 휴머노이드 로봇을 위한 AI 플랫폼 사업을 확대하고 있다. 현대자동차그룹 역시 미래 모빌리티와 로보틱스 분야 투자를 강화하고 있으며 로봇 전문기업 보스턴다이내믹스를 통해 시각 인식 기술 고도화에 나서고 있다.
산업현장에서도 변화는 뚜렷하다. 스마트공장에서는 AI가 생산제품의 불량 여부를 판별하고 있으며 물류창고에서는 로봇이 카메라를 통해 물품을 식별한다. 도시 교통체계에서는 AI CCTV가 역주행과 사고 위험을 실시간으로 분석하고 있다. AI 기술이 산업 전반으로 확산될수록 정확한 영상 인식 기술의 중요성도 함께 커지고 있는 셈이다.
이번 연구는 빠른 움직임과 저조도 환경에 강점을 가진 이벤트 카메라의 활용성을 높였다는 점에서 의미가 있다. 업계에서는 향후 자율주행차와 드론, 로봇, 스마트팩토리 등 다양한 분야에서 이벤트 카메라 기반 기술 적용이 확대될 가능성에 주목하고 있다.
주경돈 교수는 "정확한 카메라 보정은 다양한 비전 기술의 출발점이라는 점에서 의미가 크다"며 "이번 연구가 실제 환경에서 동작하는 로봇과 자율주행, AR·VR 시스템으로 확장되는 기반 기술이 될 것으로 기대한다"고 말했다.
박근호 글로벌이코노믹 기자 hotkay89@gmail.com






![[뉴욕증시 주간전망] 빅테크 실적·연준 회의…시장 향방 가를 '...](https://nimage.g-enews.com/phpwas/restmb_setimgmake.php?w=80&h=60&m=1&simg=2026072706003701387e250e8e188391236112.jpg)















