







;)
;)
;)





EPFL, 네이처에 ‘분리형 자율 이동 그리퍼’ 공개... 재난 구조 및 정밀 제조 혁신 예고
국내 로봇 강소기업 ‘물리적 AI’ 융합 가속화... 2030년 글로벌 주도권 확보 총력
국내 로봇 강소기업 ‘물리적 AI’ 융합 가속화... 2030년 글로벌 주도권 확보 총력
 이미지 확대보기
이미지 확대보기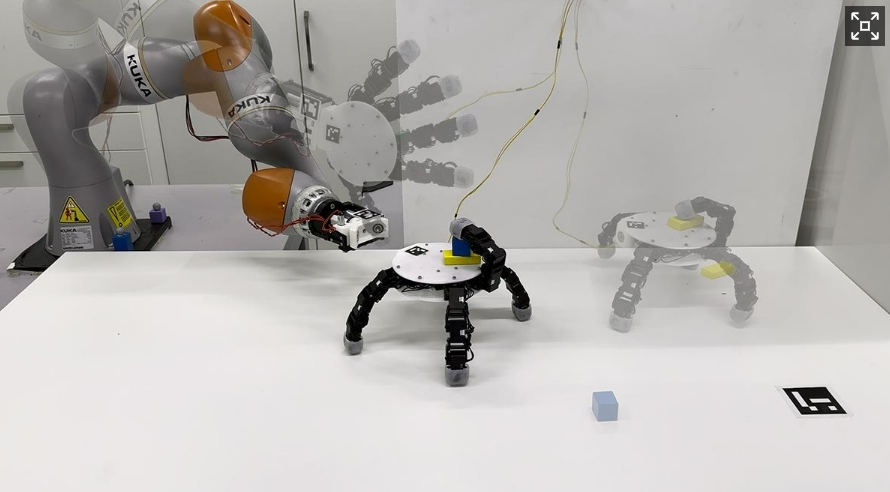
외신 기술 전문 매체 ‘슈퍼카 블론디(supercarblondie.com)’가 지난 8일(현지시각) 보도한 내용에 따르면, 스위스 로잔 연방 공과대학교(EPFL) 연구진은 국제 학술지 ‘네이처 커뮤니케이션스(Nature Communications)’를 통해 로봇 팔에서 스스로 분리되어 장애물을 피해 이동하고 물건을 수거한 뒤 다시 결합하는 지능형 로봇 손 개발에 성공했다.
로봇 팔의 생물학적 한계 극복... ‘독립형 이동 로봇 손’의 탄생
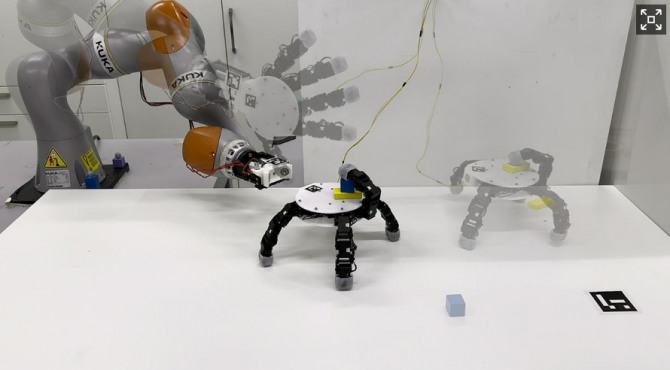
스위스 로잔 연방 공과대학교(EPFL) 연구진은 로봇 팔이 닿지 않는 먼 거리의 물체를 수거하기 위해 팔에서 스스로 떨어져 나와 이동하는 로봇 손을 개발했다.
해당 기기는 평소 일반적인 로봇 팔의 집게(그리퍼) 노릇을 수행하다가, 목표물이 팔의 가동 범위를 벗어나면 스스로 분리되어 바닥으로 내려온다.
이후 다섯 개의 손가락을 마치 다리처럼 활용해 거미가 걷는 듯한 방식으로 목표물까지 이동한다.
가장 눈에 띄는 특징은 손가락의 다목적 활용 능력이다. 이동 중에는 모든 손가락이 보행을 위해 쓰이지만, 목표물에 도달하면 일부 손가락은 물체를 고정하는 집게로 변하고 나머지 손가락은 무게중심을 잡으며 이동을 계속한다.
연구진에 따르면 이 로봇 손은 최대 3개의 물체를 연속해서 집어 올린 뒤, 다시 로봇 팔로 돌아가 스스로 결합하는 전 과정을 자율적으로 수행한다.
유전 알고리즘과 대칭 구조가 만든 고도의 제어 메커니즘
이 로봇 손이 복잡한 움직임을 구현할 수 있는 배경에는 혁신적인 설계 공학이 자리 잡고 있다. 연구진은 인간의 손이 엄지손가락을 중심으로 비대칭 구조인 것과 달리, 이 로봇 손을 완전한 대칭 구조로 설계했다.
설계 과정에는 ‘유전 알고리즘’이 도입되었다. 컴퓨터가 수많은 가상 환경에서 테스트를 반복하여 보행 속도와 파지 능력 사이의 최적의 균형점을 찾아낸 것이다.
연구진은 손가락 개수가 많아질수록 기능은 다양해지지만 무게가 늘어나 이동 효율이 떨어진다는 점을 확인하고, 최적의 손가락 개수와 관절 구조를 도출했다. 각 손가락은 4도의 자유도를 갖추고 있어 양방향으로 자유롭게 굽힐 수 있으며, 이를 통해 보행 모드와 파지 모드를 매끄럽게 전환한다.
재난 현장 및 산업 점검의 새로운 대안으로 부상
전문가들은 이러한 로봇 기술이 앞으로 위험 지역이나 인간이 접근하기 어려운 좁은 공간에서 큰 위력을 발휘할 것으로 내다보고 있다. 기존의 고정식 로봇 팔은 작업 범위가 제한적이었으나, 분리형 로봇 손은 좁은 틈새나 복잡한 구조물 사이를 자유롭게 누빌 수 있기 때문이다.
EPFL 연구팀 관계자는 인터뷰에서 “이 로봇은 단순히 기이한 움직임을 보여주기 위한 것이 아니라, 산업 시설의 내부 점검이나 재난 발생 시 잔해 속 물건 수거 등 실질적인 임무 수행을 목적으로 설계되었다”라고 설명했다.
복잡한 충돌 방지 시스템과 리듬감 있는 보행 패턴 제어 기술이 결합 되어 실생활 투입 가능성을 높였다는 평가가 나온다. 업계 안팎에서는 이러한 자율 이동형 그리퍼 기술이 미래 물류 자동화와 수색 구조 분야의 패러다임을 바꿀 핵심 기술이 될 것이라는 해석이 우세하다.
15조 원 규모 ‘로봇 끝단’ 시장의 경제적 전환점과 국내기업 대응
이러한 기술 혁신은 단순히 기계적 진보를 넘어 산업 자동화 시장의 수익 구조를 근본적으로 재편할 것으로 보인다.
시장 전문가들은 ‘이동형 그리퍼’의 등장이 고정식 로봇 팔의 공간적 제약을 해소함으로써 설비 투자 비용(CAPEX)을 낮추는 전환점이 될 것이라 보고 있다.
실제로 지능형 로봇 손을 포함한 글로벌 로봇 말단 장치 시장 규모는 오는 2030년 약 105억 달러(약 15조3000억 원)를 웃돌 것으로 전망된다.
특히 국내 로봇 강소기업들은 초정밀 구동기와 물리적 AI를 결합한 고부가가치 솔루션 개발에 박차를 가하고 있어, 향후 서비스형 로봇(RaaS) 모델을 통한 글로벌 공급망 선점과 산업 생산성 제고라는 선순환 구조를 구축할 것으로 기대된다.
서진욱 글로벌이코노믹 기자 jinwook@g-enews.com






















