







;)
;)





내년 기술 시연·2030년 실용화…인간의 능력 범위 확장
 이미지 확대보기
이미지 확대보기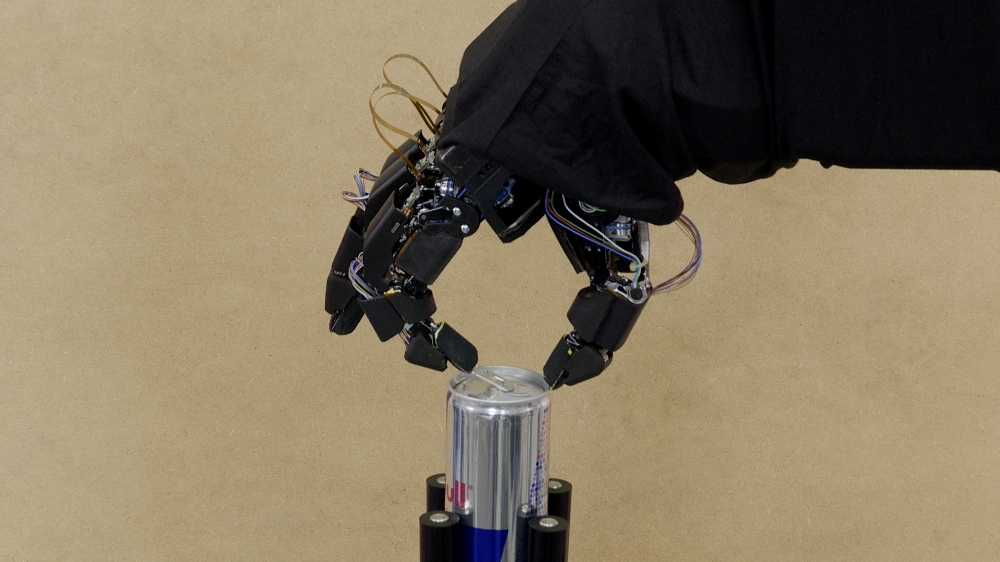
휴머노이드 로봇은 사람의 몸을 닮은 로봇이다. 디자인은 인간 도구 및 환경과의 상호 작용과 같은 기능적 목적, 이족 보행 연구와 같은 실험 목적 또는 기타 목적을 위한 것일 수 있다.
지금으로부터 10년 후, 한 남자가 갑자기 거리에서 쓰러진다. 구급차가 호출되지만 도착하는 데 시간이 걸린다. 그 사이에 인근에 배치된 로봇이 수십㎞ 떨어진 곳에 앉아 있는 전문 작업자의 통제를 받으며 긴급 치료를 위해 현장으로 달려간다.
이것은 인간형 "아바타 로봇(avatar robot)"에 대한 혼다의 비전이며 "시간과 장소의 제약 없이 사실상 인간 능력의 범위를 확장"하기 위한 프로젝트이다.
이 프로젝트는 경쟁이 심화될수록 유용한 기능에 더욱 중점을 두어 선구적인 아시모(Asimo) 이족보행 로봇 제작자에게 새로운 방향을 제시한다. 테슬라는 프로젝트 발표 1년 만인 9월 자체 휴머노이드 로봇 시제품을 공개하고 3~5년 내 시장에 내놓는 것을 목표로 하고 있다.
혼다는 이제 손에 초점을 맞추고 있다. 인간의 기능은 단순해 보이지만 그 다재다능함을 복제하기는 놀라울 정도로 어렵다.
이 회사는 작은 동전을 집을 수 있을 만큼 민첩하면서도 깡통을 잡아당겨 열거나 플라스틱 병의 뚜껑을 비틀 수 있는 힘을 가진 원격 조작 다중 손가락 손을 개발하고 있다.
혼다 R&D의 수석 엔지니어인 요시이케 다카히데(Yoshiike Takahide)는 "우리는 인간 손의 민첩성과 힘을 모두 달성하기 위해 노력하고 있다"고 말했다.
약 20년 후, 혼다는 로봇 공학 연구가 다른 방향으로 이동하면서 아시모와 작별을 고했다. 2021년 9월 아바타 프로젝트를 발표했다.
요시이케에 따르면 안전이 변경의 주된 이유였다. 아시모는 사람들이 어디를 걷고 있는지 예측하고 그들을 피하기 위해 움직일 수 있는 수준까지 발전했지만 혼다는 예를 들어 로봇이 넘어져 부상을 입히거나 어린이와 부딪히는 위험을 제거할 수 없었다.
1998년 혼다에 입사해 아시모에서 수년간 일했던 요시이케는 이족보행 로봇 기술에 대해 "허들이 높다는 느낌이 있었지만 노력하면 극복할 수 있었다"고 회상했다. 그러나 혼다는 결국 사회적 및 법적 장벽을 다루는 데 더 오랜 시간이 걸릴 것이라고 결론 내렸다.
이것은 회사가 즉시 유용한 기능에 더 가까운 기능으로 손에 넣도록 이끌었다. 아시모 스스로 병 뚜껑을 비틀거나 부수지도 않고 종이컵에서 따를 수 있었다. 혼다는 이 노하우를 바탕으로 이전 모델보다 그립력이 5배 이상 강한 새 케이블 구동 핸드를 개발했다.
다른 발전으로 인해 아바타 개념이 현실에 더 가까워졌다. 고속 5G 무선 및 위성을 통해 장거리 통신이 더 쉬워졌다.
요시이케는 인공지능을 강조하기도 했는데, 그는 이를 "많이 가속화했다"고 말했다.
AI는 로봇 조작자가 자신의 시야에 있는 움직임과 물체를 기반으로 무엇을 하려는지 측정하고 인간의 손이 자연스럽게 도구 주위를 형성하고 효과적으로 사용하는 능력을 모방하는 데 중요하다. 혼다의 손에는 강화 학습을 사용하여 복잡한 작업을 훈련하는 지원 AI가 있다.
혼다는 "기술의 목적은 사람을 돕는 것"이라는 창립자 혼다 소이치로(Honda Soichiro)의 견해에 부합하는 목표를 향해 이러한 혁신을 활용하려고 한다.
김세업 글로벌이코노믹 기자






















